I’ve developed some ROS2 projects for RoboCup to get a NAO up and running in ROS2. Some of the repositories are not SPL-specifc such that they can be used in other leagues too. I am planning on continuing development and maintaining these packages.  I appreciate feedback, issues and pull requests on these packages! Below is a screenshot and a gif showing some features that you can expect from these packages.
I appreciate feedback, issues and pull requests on these packages! Below is a screenshot and a gif showing some features that you can expect from these packages. 
3D Visualization of field line vision data received from SimSpark Simulation
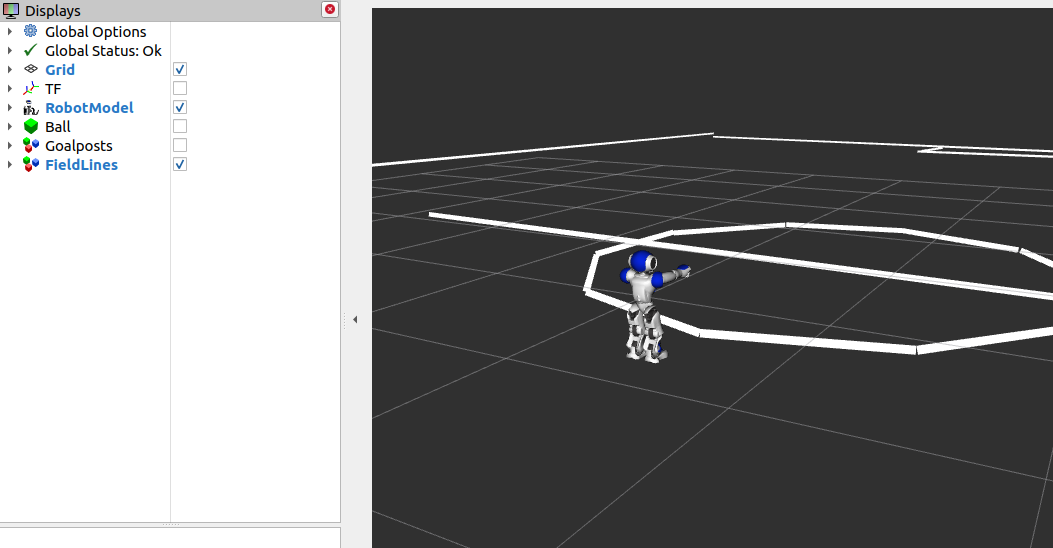
Visualization of eye leds for the NAO
Links to the projects
Soccer Interfaces - Some interfaces used in soccer, I would like to expand this topic to cover many msgs that teams can reuse. Discussion is worth a whole nother post.
Soccer Visualization - Converts soccer interfaces to visualisable topics for RViz.
Team ijnek - Some example code to make a NAO robot crouch and do a simple kick.
Nao Interfaces - Interfaces that can be used for interacting with the NAO, preserving a a similar format to the NAO LoLA interface.
Nao LoLA - A layer that communicates with LoLA (Low Level Abstraction) and does the conversion between sensor data / effector commands and ROS2 topics.
Nao Soccer Sim - Launches a Nao Robot in the SimSpark simulator and allows interaction with it through ROS2 topics.
Nao - Contains Softbank’s 3D model for the NAO V6
Nao IK - B-Human’s NAO inverse kinematics wrapped for ROS2.
Nao Soccer Visualization - Extends Soccer Visualization to also visualize information about the Nao in RViz.