We’ve started our work on ROS2 on NAO according to Nao LoLA ROS2 Setup.
We’ve installed Ubuntu 20.04 on NAO V6.
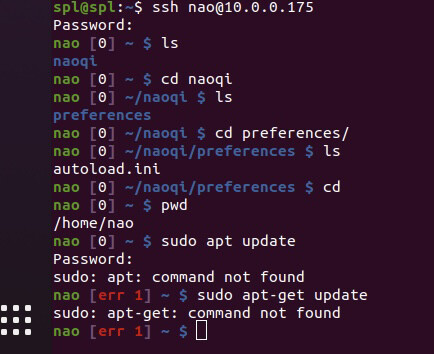
How can we solve the problem that NAO with Ubuntu can’t find sudo and apt commands?
@semendyaevsergey Great to hear that you’ve started working on ROS2 on the Nao.
The fact that the ~/naoqi/ directory exists suggests to me that you don’t have Ubuntu successfully installed on the robot, and it’s still running Naoqi.
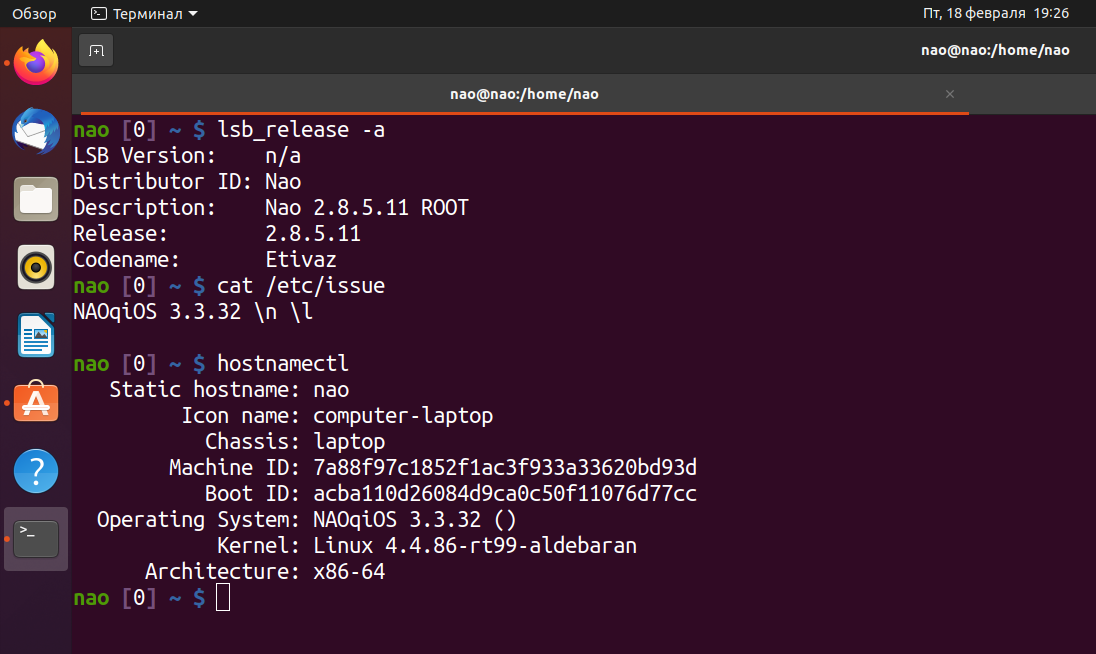
Could you confirm that you have Ubuntu running on the Nao with:
lsb_release -a
You should see something like:
Distributor ID: Ubuntu
Description: Ubuntu 20.04.3 LTS
Release: 20.04
Codename: focal
According to Install Ubuntu20.04 on NAO, you would have followed the instructions in the README.md of NaoImage. How far did you get with that?
Assuming you’re using the USB Flash Drive method on a V6, how long did it take for the robot to startup? If it didn’t flash, it’ll probably take around one minute to startup, if it successfully flashes, it should take around 3.5 minutes.
I’m just reading the README.md from NaoImage, and it doesn’t mention holding down the chest button until it lights up, and then releasing.
We have followed the instructions about creating NAO image and we’ve done all points. We’ve downloaded the image on NAO via both flash drive and internet on two robots. After about 3.5 minutes eyes and chest button started to flash white continuously, as it is mentioned in the instruction. But the robot doesn’t stand up and doesn’t react to any short presses of chest button. So it doesn’t say its IP address. What should we do next?

The robot standing up / reacting to short presses of chest button are all behaviours of the old NaoQi OS. What you described are the expected behaviours of running Ubuntu20.04 on the Nao.
The robot won’t be connected to Wi-Fi yet. You should use an ethernet cable to ssh into the robot using the default login data (nao:nao).
Once you complete this, you will have to get the robot connected to the internet (connect to your WiFi), so you can continue with Install ROS2 on NAO. The instructions for this is missing on the documentation, so please google for ways to do this.(Adding the instructions to the ROS2 LoLA documentation would be appreciated!).
A post was split to a new topic: Network connection to Nao running Ubuntu20.04