soccer_vision_msgs_layers is a ROS2 package that consists of a collection of RQt Image Overlay layers to help you visualize detected soccer-specific objects onto the robot’s camera image in real-time.
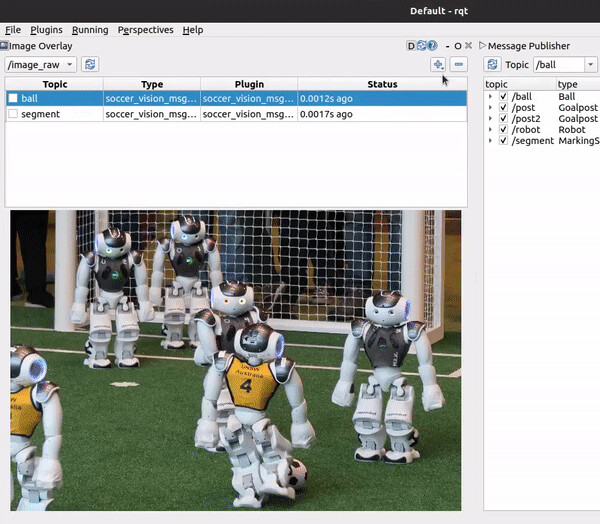
If you already use soccer_vision_msgs to publish your detected objects such as the field boundary, balls, line markings, robots and goalposts, you can quickly get a visualization like below in RQt:
Follow instructions in the repository’s README.md for more details. PRs and Issues are welcome!