In humanoid soccer leagues, it is common to detect straight field lines in an image and use them to localise. In the MSL however, the omnidirectional camera makes the straight line markings look very curved. Do any of the MSL teams detect straight field lines for localization?
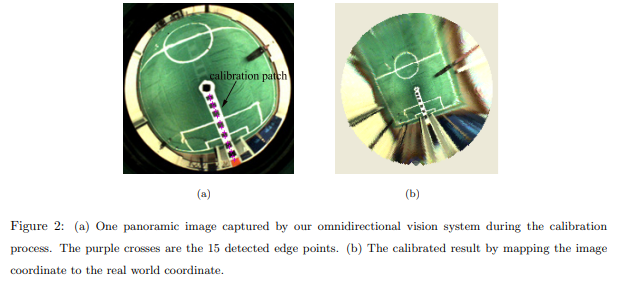
The diagram below is from the paper, Robust and Real-time Self-Localization Based on Omnidirectional Vision for Soccer Robots, where it transforms the omnidirectional image into a real world coordinate system.
If you do detect field line markings, which approach do you take,
- detect line points in the original image, then transform those points to the real world coordinate and fit lines
OR
- transform your whole image, to the real world coordinate and run all your vision algorithms afterwards?
Perhaps @MSL-RCT or any other MSL team could fill us in with what teams generally do and maybe some links to papers on vision algorithms from teams in the Middle Size League?
 They are doing the detection using original distorted images…
They are doing the detection using original distorted images…